3. Kiến thức-Thảo luận chung Thắc mắc nhỏ trong sơ đồ thủy lực.
- Thread starter LACHAU
- Ngày gửi
Nếu như không có đường Pi này thì lúc chưa thao tác thì góc nghiêng nó luôn bị đẩy max phải không Thầy ?.
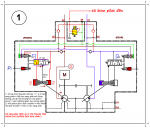
Khi không thao tác thì Pi từ van phân phối sẽ là áp suất DƯƠNG==>MIN.
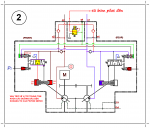
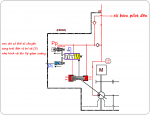
Có một phương pháp ngược lại gọi là "ĐIỀU KHIỂN DƯƠNG" (Positive Flow Control). Với PP này thì khi không thao tác Pi từ van phân phối sẽ là áp suất ÂM==>MIN.
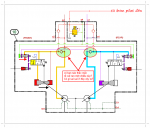
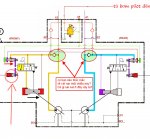
Ở 2 hình đính kèm thì:
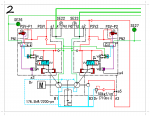
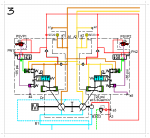
Sơ đồ số (2) là "ĐIỀU KHIỂN ÂM" (Negative Flow Control).
Còn sơ đồ số (3) là "ĐIỀU KHIỂN DƯƠNG" (Positive Flow Control).
Tiện đây hỏi luôn về cách làm sao phân biệt được "ĐIỀU KHIỂN ÂM" (Negative Flow Control) với "ĐIỀU KHIỂN DƯƠNG" (Positive Flow Control) nếu chỉ nhìn sơ đồ này?
")
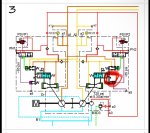
Cả 2 cái mạch giống nhau, khác nhau chỗ hình tam giác, vì sao nó là mạch điều khiển dương Thầy, có phải nó là cái chốt khi đổi vị trí nó sẽ thành âm dương tùy ý mà Thầy có nói đến trong bài viết nói về bộ regulator bơm K3V không ạ

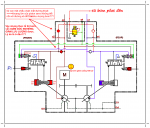
Lưu ý rằng ở hình số (2). Khi van đã khóa các đường dầu thì áp suất ở khoang ty 3 bậc, và ở hai đầu piston servo đều là 200 bar như hình minh họa.
View attachment 5639 View attachment 5641
View attachment 5642
View attachment 5639 View attachment 5641
View attachment 5642
Sửa lần cuối:
Chênh lệch tiết diện servo nên nó chạy về trái, kéo vỏ van sang trái xả đầu to servo về thùng. Vậy là chênh lệch lớn rồi ạ.???
Lại phải lưu ý rằng dù áp suất ở 2 đầu piston servo là như nhau (200 bar).
Nhưng piston servo chỉ di chuyển khi phía bên to được CẤP LƯU LƯỢNG LIÊN TỤC thì piston servo mới di chuyển.
Khi van đã về vị trí trung gian, khóa tất cả đường dầu đến đầu to của piston servo thì piston servo sẽ dừng ngay tại điểm đó và đó chính là điểm xác định góc nghiêng bơm, lưu lượng bơm.
Ý của bạn là "Chênh lệch tiết diện servo nên nó chạy về PHẢI.....XẢ ĐẦU TO SERVO VỀ THÙNG"?
Lại phải lưu ý rằng dù áp suất ở 2 đầu piston servo là như nhau (200 bar).
Nhưng piston servo chỉ di chuyển khi phía bên to được CẤP LƯU LƯỢNG LIÊN TỤC thì piston servo mới di chuyển.
Khi van đã về vị trí trung gian, khóa tất cả đường dầu đến đầu to của piston servo thì piston servo sẽ dừng ngay tại điểm đó và đó chính là điểm xác định góc nghiêng bơm, lưu lượng bơm.
Lại phải lưu ý rằng dù áp suất ở 2 đầu piston servo là như nhau (200 bar).
Nhưng piston servo chỉ di chuyển khi phía bên to được CẤP LƯU LƯỢNG LIÊN TỤC thì piston servo mới di chuyển.
Khi van đã về vị trí trung gian, khóa tất cả đường dầu đến đầu to của piston servo thì piston servo sẽ dừng ngay tại điểm đó và đó chính là điểm xác định góc nghiêng bơm, lưu lượng bơm.
Sao phụ tải lại giảm áp suất được nhỉ? Trong khi Bơm đã khoá lưu lượng lại rồi. Vậy có phải do tác động lấy lưu lượng của pi không nhỉ?.
Khi di chuyển lên dốc, áp suất bơm phải cao mới leo lên được. Hết đoạn dốc thì áp suất bơm sẽ giảm. Thậm chí sau đó xuống dốc thì áp lại giảm thêm lần nữa.
Vậy cái áp Pi có phải để khống chế lựu lượng về Min khi không làm việc phải không thầy, nếu cố tình bỏ cái đường Pi đi thì nó sẽ ra sao ạ.
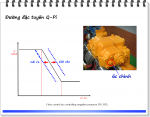
Áp suất Pi là áp suất điều khiển lưu lượng theo tay điều khiển của thợ lái.
1/- Khi kéo hết tay thì Pi giảm thấp nhất ===> lưu lượng lớn nhất (QMax).
2/- Khi trả hết tay, không thao tác thì Pi lớn nhấ t===> lưu lượng nhỏ nhất (QMin).