I. Giới Thiệu và Cơ Sở Lý Thuyết Thủy Lực
1.1. Bối cảnh và Vai trò của Bơm Lưu lượng Biến đổi (Variable Displacement Pump)
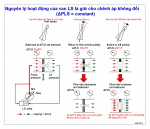
Bơm thủy lực lưu lượng biến đổi (variable displacement pump), đặc biệt là loại piston hướng trục (axial piston pump), đóng vai trò nền tảng trong các hệ thống thủy lực hiện đại, đặc biệt là trong các mạch hở (open circuit) được sử dụng rộng rãi trong thiết bị di động và công nghiệp. Khác biệt cốt lõi của loại bơm này nằm ở khả năng điều chỉnh lưu lượng đầu ra Q một cách linh hoạt theo nhu cầu thực tế của hệ thống.
Nguyên lý thay đổi lưu lượng dựa trên việc điều chỉnh góc nghiêng của tấm nghiêng (swash plate angle). Sự thay đổi góc nghiêng này trực tiếp làm thay đổi thể tích hình học của các khoang chứa dầu trong buồng bơm, từ đó điều chỉnh lưu lượng đầu ra. Khi góc nghiêng lớn nhất, bơm cung cấp lưu lượng tối đa; khi góc nghiêng bằng 0, lưu lượng đầu ra bằng 0.
Lợi thế chiến lược của bơm biến đổi lưu lượng so với bơm cố định hoặc bơm áp suất bù trừ (Pressure Compensated - PC pump) truyền thống là khả năng đạt được hiệu suất năng lượng vượt trội. Trong các hệ thống cũ, lưu lượng không cần thiết sẽ bị xả qua van an toàn, biến công suất thừa thành nhiệt. Tương tự, bơm PC duy trì áp suất ở mức tối đa (Pmax), dẫn đến tổn thất áp suất đáng kể (và do đó là tổn thất công suất) qua van điều khiển khi tải nhẹ. Bơm lưu lượng biến đổi, thông qua bộ điều chỉnh tích hợp (regulator), loại bỏ đáng kể những lãng phí này bằng cách chỉ cung cấp đủ áp suất và lưu lượng cần thiết để thực hiện công việc.
1.2. Mục tiêu của Bộ Điều chỉnh Tích hợp (Regulator)
Bộ điều chỉnh (regulator) trên bơm lưu lượng biến đổi không phải là một van đơn lẻ mà là một tổ hợp các van bù trừ (compensators) hoạt động đồng bộ. Mục tiêu của tổ hợp này là thiết lập một vùng hoạt động an toàn và tối ưu cho bơm, bao gồm ba chức năng chính:
Tất cả các chức năng điều khiển (LS, PC, PL) đều hội tụ tại cơ cấu vật lý điều chỉnh góc nghiêng swash plate. Cơ cấu này thường bao gồm một piston servo (servo-piston), thường được thiết kế với piston có diện tích to-nhỏ khác nhau ở hai đầu để tăng lực điều khiển.
II. Cơ chế Điều khiển Lưu lượng theo Yêu cầu (Load Sensing - LS)
(Sẽ nói tiếp ở phần 2 vì diễn đàn chỉ cho phép bài viết khống quá 10.000 chữ)
1.1. Bối cảnh và Vai trò của Bơm Lưu lượng Biến đổi (Variable Displacement Pump)
Bơm thủy lực lưu lượng biến đổi (variable displacement pump), đặc biệt là loại piston hướng trục (axial piston pump), đóng vai trò nền tảng trong các hệ thống thủy lực hiện đại, đặc biệt là trong các mạch hở (open circuit) được sử dụng rộng rãi trong thiết bị di động và công nghiệp. Khác biệt cốt lõi của loại bơm này nằm ở khả năng điều chỉnh lưu lượng đầu ra Q một cách linh hoạt theo nhu cầu thực tế của hệ thống.
Nguyên lý thay đổi lưu lượng dựa trên việc điều chỉnh góc nghiêng của tấm nghiêng (swash plate angle). Sự thay đổi góc nghiêng này trực tiếp làm thay đổi thể tích hình học của các khoang chứa dầu trong buồng bơm, từ đó điều chỉnh lưu lượng đầu ra. Khi góc nghiêng lớn nhất, bơm cung cấp lưu lượng tối đa; khi góc nghiêng bằng 0, lưu lượng đầu ra bằng 0.
Lợi thế chiến lược của bơm biến đổi lưu lượng so với bơm cố định hoặc bơm áp suất bù trừ (Pressure Compensated - PC pump) truyền thống là khả năng đạt được hiệu suất năng lượng vượt trội. Trong các hệ thống cũ, lưu lượng không cần thiết sẽ bị xả qua van an toàn, biến công suất thừa thành nhiệt. Tương tự, bơm PC duy trì áp suất ở mức tối đa (Pmax), dẫn đến tổn thất áp suất đáng kể (và do đó là tổn thất công suất) qua van điều khiển khi tải nhẹ. Bơm lưu lượng biến đổi, thông qua bộ điều chỉnh tích hợp (regulator), loại bỏ đáng kể những lãng phí này bằng cách chỉ cung cấp đủ áp suất và lưu lượng cần thiết để thực hiện công việc.
1.2. Mục tiêu của Bộ Điều chỉnh Tích hợp (Regulator)
Bộ điều chỉnh (regulator) trên bơm lưu lượng biến đổi không phải là một van đơn lẻ mà là một tổ hợp các van bù trừ (compensators) hoạt động đồng bộ. Mục tiêu của tổ hợp này là thiết lập một vùng hoạt động an toàn và tối ưu cho bơm, bao gồm ba chức năng chính:
- Điều khiển Lưu lượng theo Tải (Load Sensing - LS): Đảm bảo lưu lượng dầu tỷ lệ chính xác với mức độ mở của van điều khiển, nói cách khác là cung cấp lưu lượng vừa đủ theo yêu cầu của thợ vận hành (thông qua tay điều khiển) bất kể sự thay đổi của tải trọng.
- Bù Áp suất Tối đa (Pressure Compensating - PC): Thiết lập giới hạn áp suất cứng (Pmax) để bảo vệ hệ thống khỏi hư hỏng do áp suất quá cao.
- Bảo vệ Quá tải Công suất (Power Limiting - PL hay còn gọi là CUT-OFF): Giới hạn công suất thủy lực (P×Q) đầu ra để đảm bảo động cơ sơ cấp (thường là động cơ đốt trong) không bị quá tải mô-men xoắn.
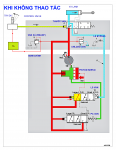
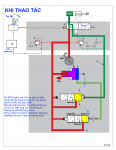
Tất cả các chức năng điều khiển (LS, PC, PL) đều hội tụ tại cơ cấu vật lý điều chỉnh góc nghiêng swash plate. Cơ cấu này thường bao gồm một piston servo (servo-piston), thường được thiết kế với piston có diện tích to-nhỏ khác nhau ở hai đầu để tăng lực điều khiển.
- Lực chờ thường trực: thông thường, đầu có tiết diện nhỏ hơn sẽ được cấp áp liên tục đẩy swash plate về vị trí góc nghiêng tối đa (maximum displacement), đảm bảo bơm có khả năng đáp ứng lưu lượng ngay lập tức khi cần.
- Lực điều khiển (Control Force): Áp suất dầu điều khiển (control pressure), được điều tiết bởi các van bù LS, PC, hoặc CUT-OFF, tác động lên phía có tiết diện lớn hơn của servo-piston. Khi áp suất điều khiển này tăng, nó thắng lực phía có tiết diện nhỏ hơn của piston-servo, dịch chuyển servo-piston, làm giảm góc nghiêng swash plate (de-stroke), và giảm lưu lượng đầu ra của bơm.
II. Cơ chế Điều khiển Lưu lượng theo Yêu cầu (Load Sensing - LS)
(Sẽ nói tiếp ở phần 2 vì diễn đàn chỉ cho phép bài viết khống quá 10.000 chữ)
Sửa lần cuối: